在创伤外科手术中,术中透视越来越重要。使用移动式 C 型臂进行透视,通过调整C臂的倾斜度,可以获得几乎无限的图像。然而,要理解图像并选择 C 型臂的适当位置以获得真实的视图并非易事。如今,髋部骨折被认为是一个重大的医疗问题,1 年死亡率高达 30%,而且由于人口老龄化,发病率还在不断上升。股骨转子间骨折是一种常见的骨折,最常用的治疗方法是股骨近端髓内钉和滑动髋关节螺钉板。这两种技术都需要在髋关节的前后位和轴位上通过颈部和头部正确放置拉力螺钉。螺钉的不正确定位是假体失败的前兆,特别是考虑到尖端距离和克利夫兰区。尽管近端股骨固定系统和技术有所改进,但失败率仍高达16%。为了提供螺钉的正确位置,描述了两种类型的侧视图:勒温斯坦侧视图 (LLV),定义为 C 臂水平放置时的侧视图;所谓的真侧视图 (TLV),定义为 C 臂与冠状面倾斜约 15-20° 的侧视图,与股骨颈内翻平行。然而,在大多数情况下,外科医生可以选择确定哪种是指导手术的最佳图像,即使更容易的LLV是最常用的。
据我们所知,迄今为止还没有研究通过比较两个侧视图来指导股骨近端螺钉的正确定位。本研究的目的是利用尸体股骨,调查 LLV 和 TLV 在头侧髋关节螺钉定位方面的关系。我们假设 TLV 可以确定滞后螺钉在股骨头中的真实位置,从而指导外科医生更好地评估植入物的位置。

我们使用8具新鲜冷冻尸体(4男4女,选择无骨骼病变)的8根股骨(5右3左)进行研究。平均年龄87.5岁(范围77 ~ 94岁;标准偏差(SD) 6.16)。股骨与周围软组织已清理干净。我们报告了标本股骨近端的主要几何参数:主要头部直径、颈轴角和内翻角。每根股骨水平向上夹在刚性支架上,股骨滑车平行于地面,模拟患者术中在牵引台上的位置。c臂也被放置模拟术中方向(图1)。
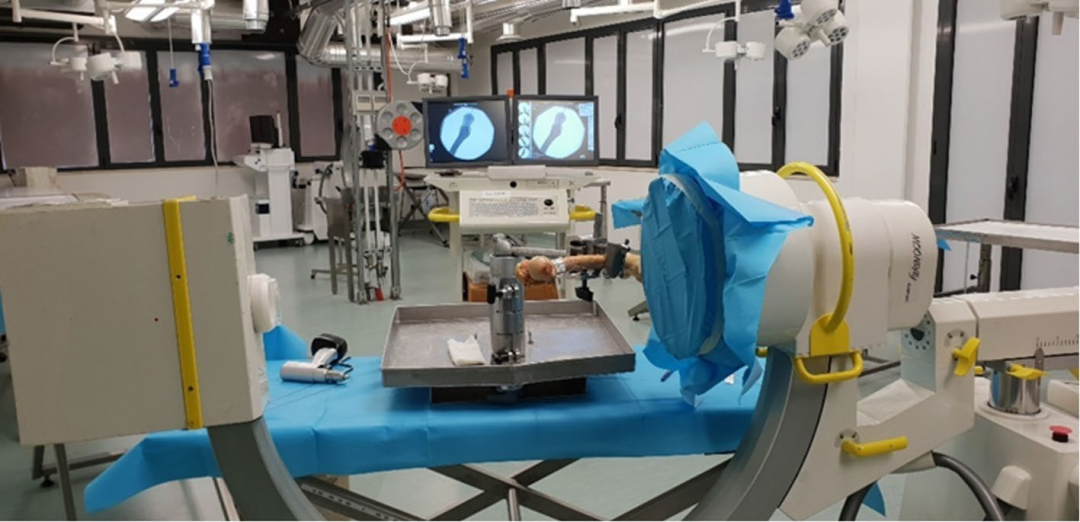
图 1 该图像显示了股骨和透视机的位置,其位置模拟了术中的真实方位。
在透视引导下,我们将两根克氏针(直径2mm)放置在股骨头和颈的不同高度。通过标准 AP 投影、LLV 和 TLV 进行 K 针插入和评估。将 C 型臂的 X 射线管垂直于地面,获得 AP 图像。将透视机水平转动,使 X 射线管与地面平行,从而获得 LLV。股骨颈生理性内翻,通过 C 臂定位获得 TLV,使股骨颈轴线与股骨干轴线在同一平面上,头颈部与股骨干完全平行。通过观察颈部和股骨干的前部和后部皮质,判断颈部轴线与股骨干部轴线平行。当两者平行时,则认为颈部与股骨干对齐(图 2)。
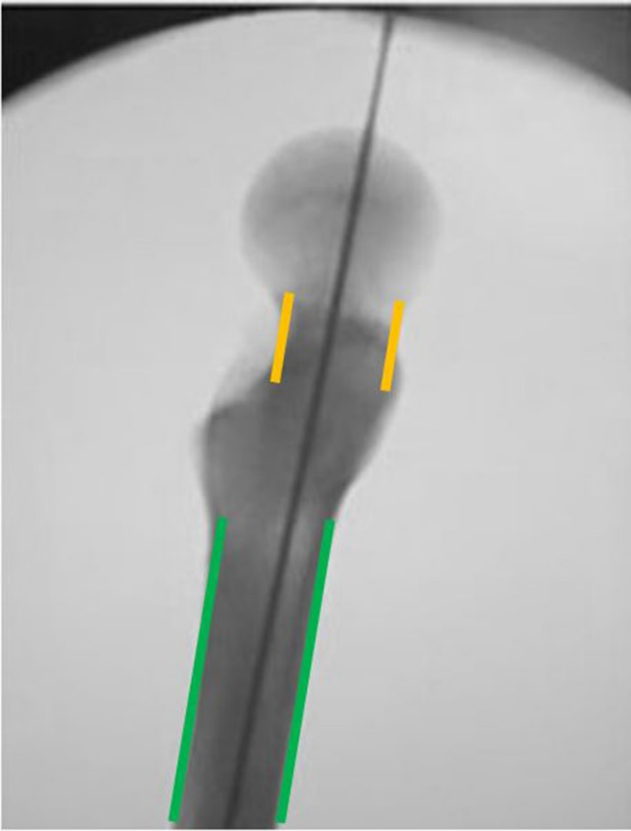
图 2 当颈部前后皮层(黄线)与股骨干部前后皮层(绿线)完全平行时获得的真实侧视图(TLV)。
在TLV和AP投影下,尽可能将第一根K线(K1)放置在股骨颈和股骨头的中心,同时注意在TLV上K线与股骨头干骺端之间的平行度。然后进行 LLV 检查,以验证 K 线位置是否有可能发生改变(图 3)。
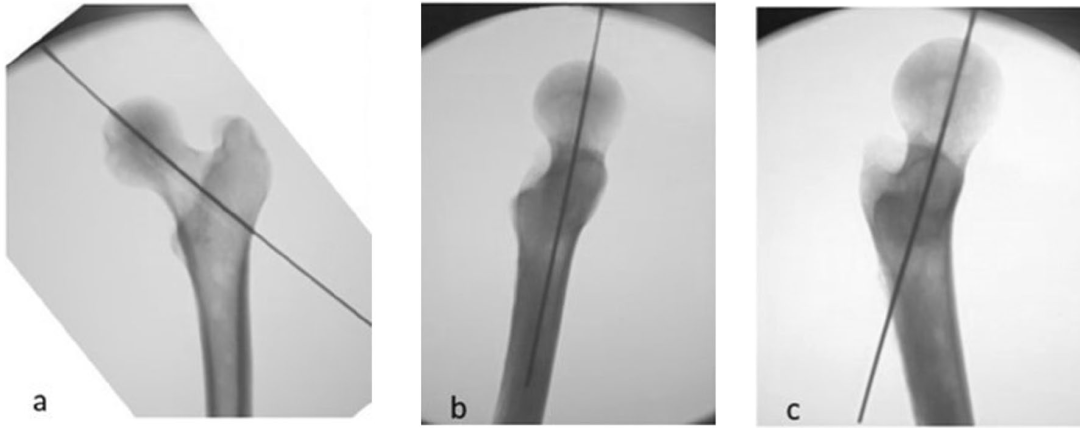
图3 a克氏针置于颈和股骨头中心的前后投影图。b在真侧位面(TLV)下,尽量将k针置入颈股骨头中心,注意k针与股骨干平行。c Löwenstein定位k针后形成的侧位视图(LLV) ,以验证k针在头部和股骨颈上的位置可能发生的变化。
使用 TLV 和 AP 投影,在 AP 视图中将第二根 K 线(K2)放置在前一根 K 线的近端,在两个投影(AP 和 TLV)中将前一根 K线平行放置。在TLV投影中,尽量保持两根K线与股骨干的平行。然后进行LLV 检查,以验证是否可能对 K 线位置进行调整(图 4)。
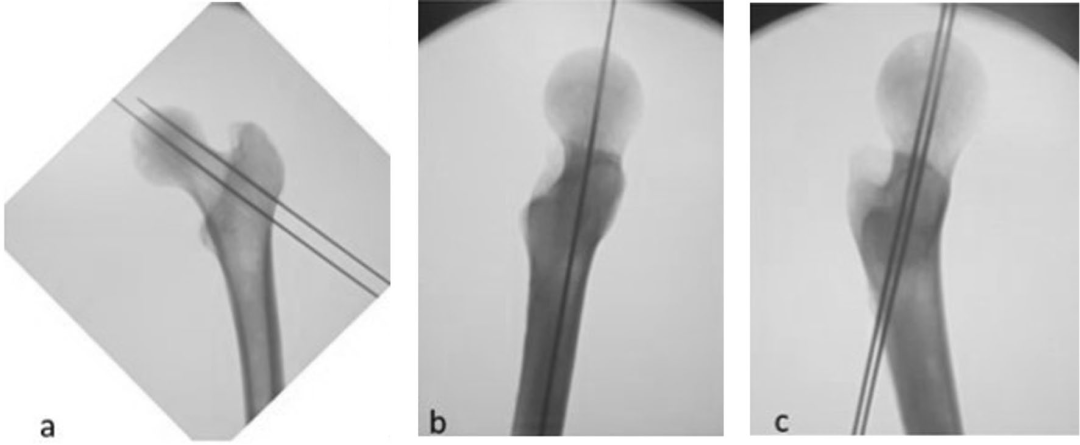
图4 a第二根克氏针与前一根相比位于近端,并与前一根平行。b在真实侧位视图(TLV)中,第二根k线尽可能与前一根平行。c Löwenstein定位第二根k针后进行侧位视图(LLV),以验证第二根k针在股骨头颈上的位置可能发生变化。
在AP视图和两个侧位(LLV和TLV)上,通过brainlab - creacad:registered:软件,测量k针进入股骨头的位置。所有测量都是根据已知的k线直径进行校准的。通过该软件,我们将x射线上的股骨头测量归一化,在AP视图下通过股骨头上、下和内侧端股骨头皮质,并在两个侧位投射(LLV, TLV)上通过股骨头皮质的顶点、前点和末端后点。我们画了两条垂直于 K 线(K1 和 K2)的线,并穿过从正常化股骨头获得的圆周中心,从而测量了 AP 视图上 K 线(K1 和 K2)与上皮质和下皮质之间的距离,以及两个侧视图上 K 线(K1 和 K2)与前皮质和后皮质之间的距离(图 6、7 和 8)。
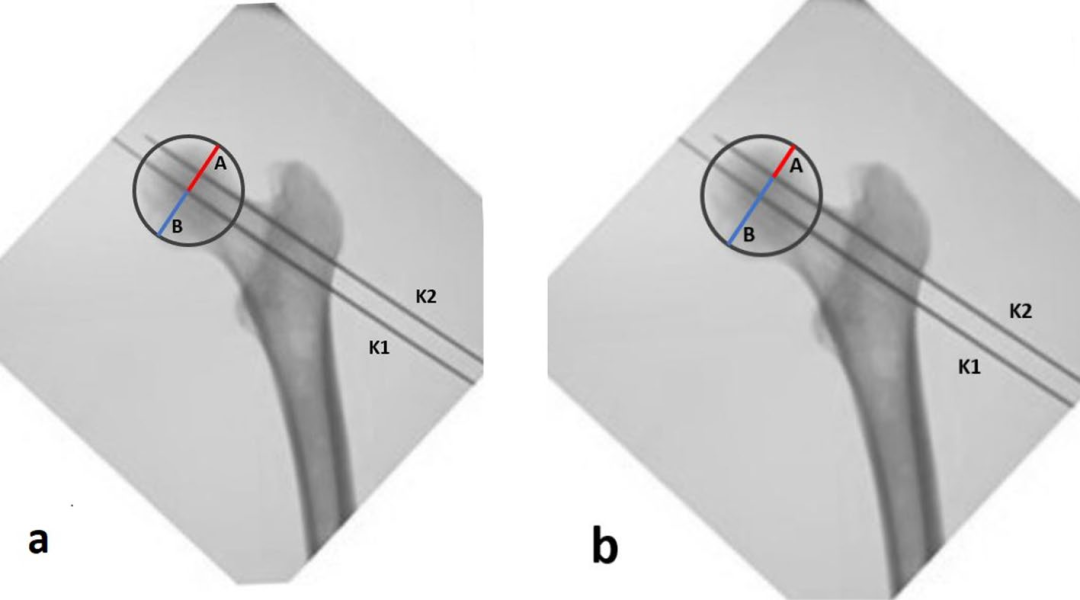
图 6 通过 TraumaCad:registered: 软件在股骨头前正视图上对股骨头进行归一化处理,圆环穿过股骨头皮质的上部、下部和内侧极点。a 我们画了两条垂直于第一根 Kirschner 线 (K1) 的线,穿过归一化处理后股骨头圆周的中心,从而测量了 K1 与上部皮质之间的距离 (A),以及 K1 与下部皮质之间的距离 (B)。b 我们画了两条垂直于第二根 Kirschner 线 (K2) 的线,穿过从正常化股骨头获得的圆周中心,从而测量 K2 与上皮质之间的距离 (A) 以及 K2 与下皮质之间的距离 (B)。
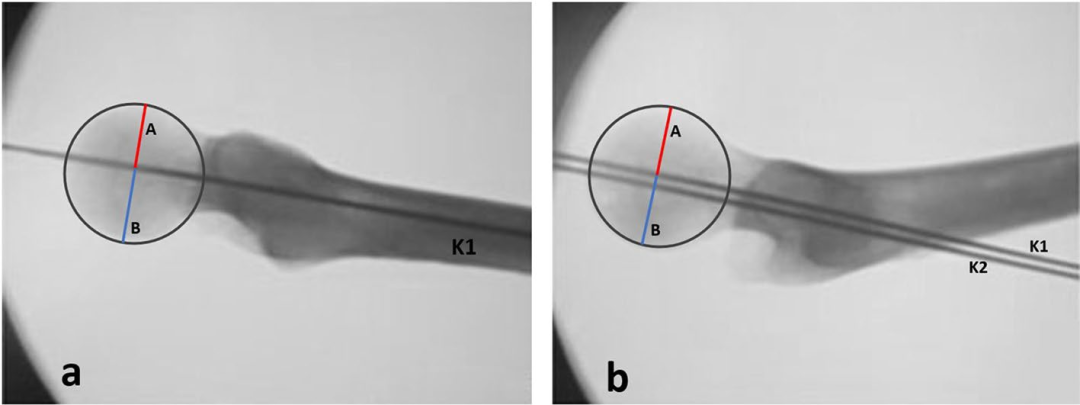
图 7 通过 Brainlab-TraumaCad:registered: 软件,在 Löwenstein 侧视图 (LLV) 和真侧视图 (TLV) 中,通过穿过顶点、前端和股骨头皮质极后部的圆对股骨头图像进行归一化处理。a 在通过 TLV 获得的图像上,K1 和 K2 重叠在一起;我们画了两条垂直于第一个 Kirschner(K1)的线,并穿过从归一化股骨头获得的圆周中心,从而测量了 K1 与前部皮质之间的距离(A)和 K1 与后部皮质之间的距离(B)。b 在通过 LLV 获得的图像上,我们绘制了两条垂直于 K1 的线,并穿过从归一化股骨头获得的圆周中心,从而测量了 K1 与前皮质之间的距离 (A) 以及 K1 与后皮质之间的距离 (B)。
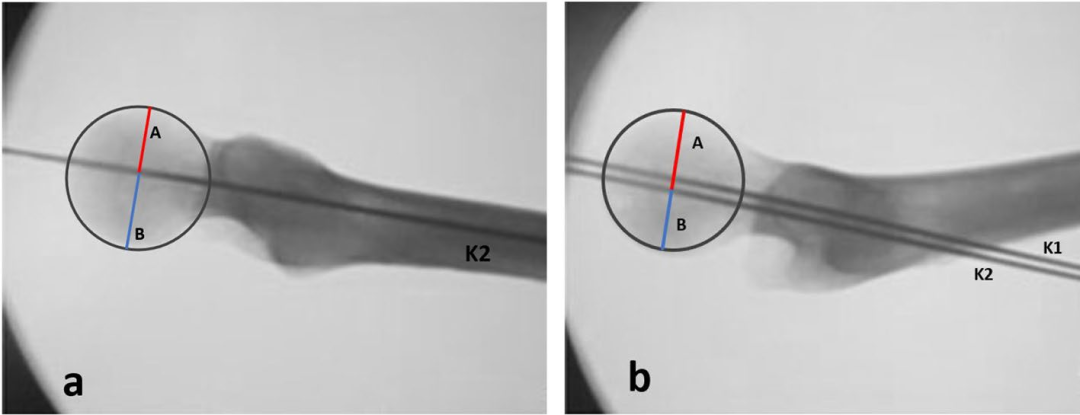
图8 通过Brainlab-TraumaCad:registered:软件,在Löwenstein侧视图(LLV)和真侧视图(TLV)中,通过顶点、前端和股骨头皮质极后部的圆圈对股骨头图像进行归一化处理。a 在通过TLV获得的图像上,K1和K2是重叠的。我们画了两条垂直于第二个 Kirschner(K2)的线,并穿过从归一化股骨头获得的圆周中心,从而测量了 K2 与前皮质之间的距离(A)和 K2 与后皮质之间的距离(B)。b 在通过 Löwenstein 侧视图 (LLV) 获得的图像上,我们画了两条垂直于第二根 Kirschner 线 (K2) 的线,并穿过从归一化股骨头获得的圆周中心,从而测量 K2 与前皮质之间的距离 (A) 和 K2 与后皮质之间的距离 (B)。
股骨K针置入满意后,于股骨头基底部将股骨锯断,并拍摄照片记录钢针的大体位置(图 5)。
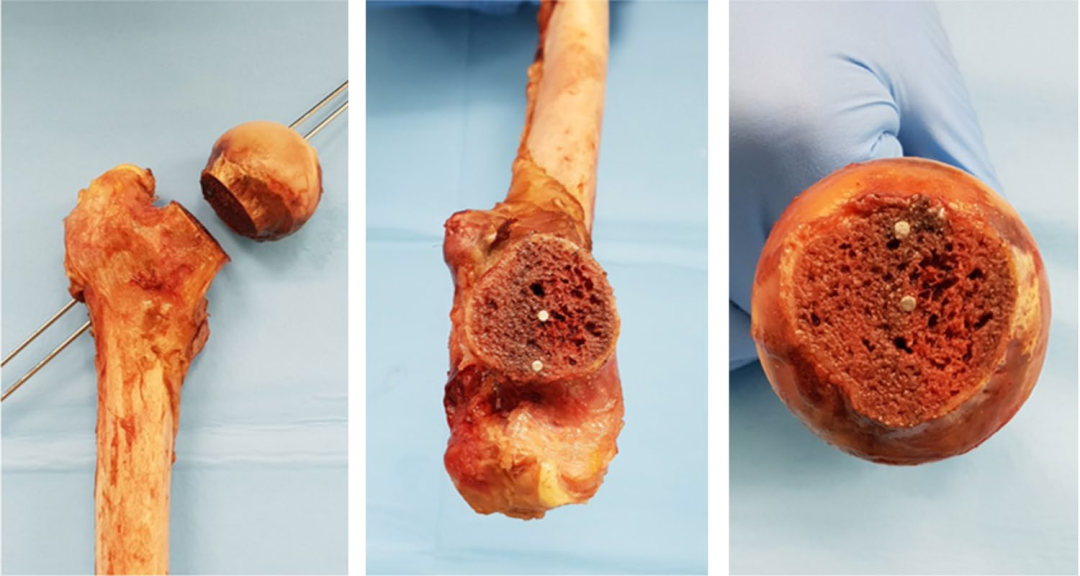
图5 克氏针最终定位后截骨近端股骨头基底部的宏观图像。
然后测量 K 针的位置,以记录真实的宏观定位。在解剖后的股骨头图像上,我们通过 Brainlab-TraumaCad:registered: 软件对照片上的股骨头测量值进行归一化处理,即在通过股骨头上皮质、前端和极后部皮质的圆圈上画两条垂直于 K 线(K1 和 K2)和归一化后股骨头圆周直径的线。然后测量两条 K 线(K1 和 K2)与上皮质、下皮质、前皮质和后皮质之间的距离(图 9)。
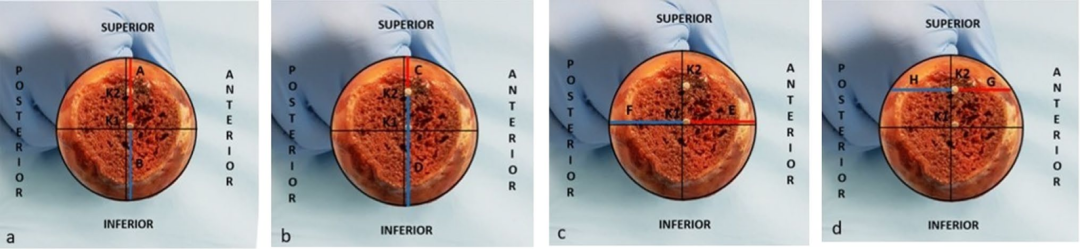
图 9 在解剖的股骨头图像上,通过 Brainlab-TraumaCad:registered: 软件,我们将照片上的股骨头测量值归一化,即通过股骨头皮质上部、前端和极后部的圆圈。a 我们画了两条垂直于第一根 Kirschner 线(K1)和归一化后股骨头圆周直径的线,从而测量了 K1 与上皮质之间的距离(A)和 K1 与下皮质之间的距离(B)。b 我们画了两条垂直于第二根 Kirschner 线(K2)和从正常化股骨头获得的圆周直径的线,从而测量了 K2 与上皮质之间的距离(C)和 K2 与下皮质之间的距离(D)。c 我们画了两条垂直于 K1 和股骨头圆周直径的线,从而测量了 K1 与前皮质之间的距离 (E) 和 K1 与后皮质之间的距离 (F)。d 我们画了两条垂直于 K2 和正常化股骨头圆周直径的线,从而测量了 K2 与前皮质之间的距离 (G) 和 K2 与后皮质之间的距离 (H)。
最后,我们计算了所有测量值的准确度,即测量值与真实值的接近程度。为此,我们使用了以下公式:
准确值(A)=真实值/测量值
我们将通过解剖股骨头的宏观图像获得的值视为真实值,将通过透视图像获得的值视为测量值。我们将前后距离和上下距离的比率分别作为真实值和测量值。准确最高的值等于 1;为此,我们计算了 1 与各种测量精度结果之间的绝对差值 (Δ)。
结果
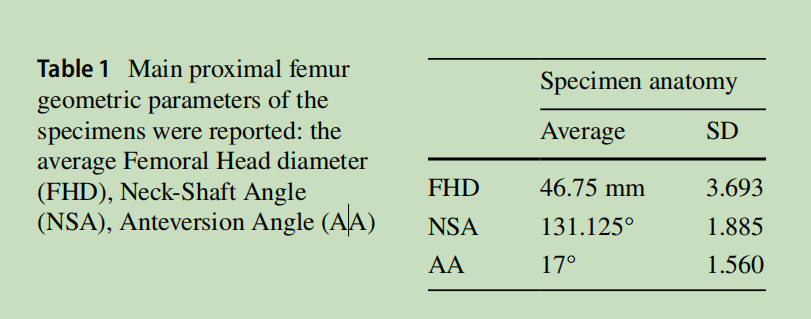
股骨长径平均为46.75 mm±3.693 (SD),颈轴角平均为131.125°±1.885 (SD),前倾角平均为17°±1.560 (SD)(表1)。
调整C臂与地面角度,使成角与各侧股骨头前倾角一致获得TLV位像。在前后位片上,K1克氏针与股骨上端皮质平均距离为24.212±1.940 mm,而K1克氏针与股骨下端皮质平均距离为25.800±1.445 mm,确定其比值为0.9416±0.097(图6a)。
AP位片上,K2克氏针至股骨头皮质平均距离为12.112±1.758 mm,而至下皮质的平均值为37.912±1.734 mm,比值为0.3186±0.035(Fig. 6b);TLV位片上,K1克氏针至前皮质的平均距离为16.825±1.7539 mm,而至后皮质的平均距离为20.79±1.032 mm,比值为0.8105±0.088(Fig. 7a)。LLV组K1针与股骨头前部皮质平均距离为14.700±1.592mm,K1针与股骨头后部皮质平均距离为18.312±1.295mm,比值为0.8032±0.0722(Fig. 7b);TLV组K2针与股骨头前部皮质平均距离为16.837±1.792mm,K2针与股骨头后部皮质平均距离为20.750±1.473mm,比值为0.8083±0.081(Fig. 7a)。在LLV定位下,K2针与股骨头前、后部骨皮质的距离分别为24.362±1.085 mm和19.650±1.531 mm,比值为1.2486±0.136(图8)。在解剖股骨头的图像上,K1线与股骨上皮层的距离为19.112 ± 1.701毫米,而与下皮层的距离为20.937±1.595毫米,比率为0.9138±0.038;K2线与股上股骨皮层的距离为9.5875 ± 0.916毫米,而与下皮层的距离为30.412±1.493毫米,比率为0.3164±0.039。K1 线与前皮层的距离为 19.287 ± 1.652 mm,与后皮层的距离为 20.712 ± 1.278 mm,比值比为 0.9304 ± 0.038。K2 线与前皮层的距离为 15.912±1.481 mm,与后皮层的距离为 17.637±1.329 mm,比率为 0.9020±0.046(图 9)。AP 视图的准确性为 K1 的 0.9705(Δ=0.0295),K2 的 0.9930(Δ=0.007)。当导线在 AP 视图和 TLV(K1)上位于头部中心时,TLV 和 LLV 的精确度分别为 1.1479(Δ =0.1479)和 1.1584(Δ =0.1584)。当导线在 AP 视图中位于近端,在 TLV 中位于中心(K2)时,TLV 和 LLV 的准确度分别为 1.1159(Δ=0.1159)和 0.7224(Δ=0.2776)。在 AP 视图上,K2 的准确度最高(Δ=0.007),而在 LLV 上,K2 的准确度最差(Δ=0.2776)。结果汇总于表 2。
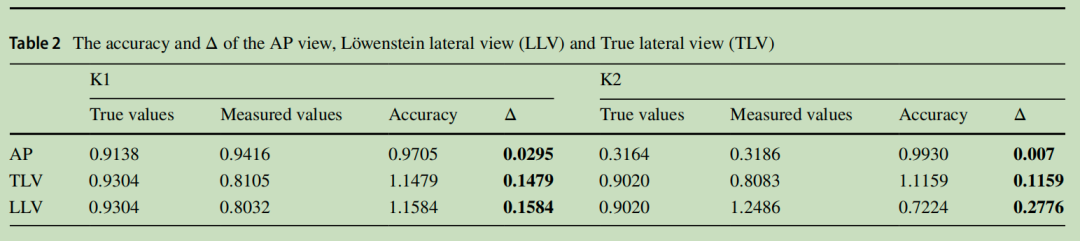
最重要的数值以粗体显示。
讨论
目前缺乏系统性研究,也没有关于股骨转子骨折术中透视的真正金标准。许多外科医生并不了解如何准确评估股骨近端骨折的术中成像。我们的研究旨在帮助骨科医生解读术中射线投影,从而做出正确的选择。切出被定义为股骨头内翻塌陷,同时头螺钉从股骨头穿出。这是髓内和髓外股骨头骨植入物治疗转子骨折内固定失效的主要原因。有几个变量与切出有关,但尖顶距仍然是主要的预测因素。因此,正确理解术中透视影像对头螺钉的最佳位置非常重要。在我们的研究中,AP视图计算的精度与K1和K2线(分别为0.9705和0.9930)相当,其值非常接近最大值1。因此,K1和K2的精度都很高,说明这两条线在这个投影中的位置非常接近现实。改变c臂从TLV到LLV的角度,我们观察到k针中心(K1)位置没有改变,k 针近端位置(K2)发生了变化(图4b, c)。比较 K1 和 K2 的 LLV 精确度,我们发现 K2 线的精确度(0.7224)低于 K1 (1.1584)。在 AP 视图和 TLV(K1)中将 K 定位在头部中心,TLV 和 LLV 的精确度完全相似(分别为 1.1479 和 1.1584),其值非常接近最大值 1。
当钢丝在 AP 图上位于中心钢丝的近端,而在 TLV 图上位于中心钢针时(K2),TLV 和 LLV 投影的精确度似乎有所不同(分别为 1.1159 和 0.7224)。在这种情况下,TLV 实际上是更接近最大值 1 的投影,因此也是最准确的。因此,K 针在 LLV 上的位置与其实际位置有偏差。LLV 没有考虑股骨颈的前倾角,因此不应被视为真正的侧位投影,而应被视为斜位投影。假设股骨头是一个球体,那么在所有投影(LLV、TLV 和 AP 切面)中,股骨头的中心都是相同的。但是,在偏心定位的情况下,LLV 无法准确确定 K 线(或头螺钉)的前后位置。TLV考虑股骨颈前倾角,因此与AP视图完全垂直。这有助于准确量化K线的AP偏差程度,而不会受K线在AP视图上位置的影响。
考虑植入物位置与并发症风险之间的关系,如今广泛应用计算机辅助和机器人辅助近端股骨钉的置入。Muramaki 等人使用 ADAPT 系统(Stryker Kalamazoo, Michigan, USA)比较了术中尖端顶点距离和尖端到头部表面距离与术后 CT 的相对测量值,结果表明该系统具有很高的准确性。Li等人进行的系统综述证实,与徒手滞后螺钉定位相比,计算机辅助系统提高了尖顶距离的平均值,但手术时间和辐射时间并没有减少。同样,Coviello等人评估了ATLAS系统(意大利巴里Modugno的Masmec Biomed公司),发现与传统的钉骨相比,需要更长的手术室准备时间。因此,我们认为计算机辅助系统的成本效益需要在未来得到更好地确认,正确的术中放射学分析仍然对髋部骨折固定术至关重要。
正如Chen等人所证明的那样,在顺行钉入过程中,股骨近端透视成像的重要性不仅对螺钉定位至关重要,而且对实现满意的复位也至关重要。他们发现 30° 倾斜投影对研究股骨前内侧皮质具有重要意义,该皮质被认为是股骨近端的基石。皮质与皮质之间的接触对于为颈部-头部复合体提供支撑功能至关重要。另一种治疗髋部骨折的手术方法是股骨颈螺钉固定术。同样,这种技术的术中评估也很重要,通常以螺钉的 倒三角 配置为基础。一种可能的并发症是后上方螺钉的 内-外-内 定位。Hofmann 等人的研究表明,70% 的后上部螺钉是以 内-外-内 的方式放置的,尽管在前正位和侧位视图中,这些螺钉可能位于骨内。由于可能损伤外侧骨骺动脉的风险以及构建的机械强度较低,可能导致骨坏死。因此,我们认为进行彻底可靠的术中透视评估是必要的,以实现正确的复位和固定。通过将 K 线置于颈部/头部中心,所有使用的投影(AP、TLV、LLV)均显示出较高的准确性,并能准确表达 K 线的真实位置。当在 AP 切面中将 K 线放置在近端,而在 TLV 视图中将 K 线放置在中心位置时(K2),只有 TLV 切面显示出较高的准确性,并表达了 K 线的真实位置。然而,正如我们所观察到的,只有当 K 线平行于骨骺和股骨颈放置时,这些关于 TLV 的考虑才适用。如果不注意平行度,TLV 就会失去准确性。
我们的研究存在一些需要考虑的技术局限性。没有使用整个下肢标本可能被认为是一个限制,因为只有股骨无法再现手术室的实时情况。股骨头不是完美的球形,股骨颈也不是完美的圆柱形。即使在尸体研究中,也很难将 K 线完美地放置在股骨头中心和计划位置。这就是为什么我们不能达到完全等于1的精度的原因。为了简化研究,我们决定只使用两根k线。我们假设同样的考虑也适用于任何偏心位置(近端,远端,内侧,外侧)的k针,前提是保持与颈和股骨轴的平行。
结论
综上所述,通过将克氏针定位于颈部/头部的中心,所有使用的投影(AP, TLV, LLV)都显示出较高的准确性,以表达克氏针的真实位置。当k线在AP视图上近端定位,在TLV视图上正中定位时,只有TLV视图能准确反映k线的真实位置;这是因为TLV完全正交于AP视图,从而可以量化克氏针的真实AP偏差程度。
文献来源:Accuracy of radiographic projections to guide cephalic screw position in pertrochanteric fracture: a cadaveric study
https://doi.org/10.1007/s00590-023-03690-z
-END-
声明:本文为原创内容,作者杨海平,仅用于学习交流,未经授权禁止转载!